



机械传动
369 浏览
机械互锁和电气互锁原理的区别
机械自动化类 小明记得记得#87 2017-02-08 10:22 发表了文章
控制回路要先将分别控制正反转停止的两个按钮串联接好,随后将两个分别控制正反转启动的两个按钮并联接好后与停钮的一端接好,停钮的另一端准备与电源连接,然后再把分别正转反转主接触器的常开辅助接点分别并联在各自相对应的启动按钮两端,之后再将各自主接触器的常闭辅助接点串联到对方的启动回路中,也就是说正转的常闭串接在反转启动按钮的一端,相对应反转的常闭接点要与正转的启动按钮一端串联,起到互锁的作用,(就是说正转运行时期接触器常闭辅助接点会将反转的启动回路断开,反之则依然是这个道理,为的是防止同时期按下下按钮会造成一次回路的相间短路,这个待会再解释),然后将两个常闭接点的另一端分别与所对应的启动回路的主接触器的线圈一段进行连接(就是说控制正转地启动的回路就串接正转接触器的线圈一段,反转起动控制回路就与反转的主接触器线圈一端串接,不要弄混了)将两个线圈的另一端并联接在一起后接入热继电器的常闭接点的一端,热继电器常闭接点的另一端准备与中性点N或另一相线连接,这要看主接触器线圈的电压(220V就与中性点N连接,380v的话就接另外一相线),还需要在控制回路的最前端即停止按钮准备接电源的一端在接相线制前要经过一个控制保险,现在只能说控制回路接好了。下面就接主回路,主回路需要2个接触器,分别用于正转和反转时接通主回路,所以将两个接触器主触头的上端分别与三相交流电源的3条相线连接,而主触头的下端对应的触头上则要将其中任意两条线互换一下,然后按照互换以后的顺序接入电动机绕组连接好以后的3个连接片上(比如说三相电源ABC顺序接到一个接触器上口,并在此处按照相同的顺序与另外一个接触器上口并联,然后其中一个接触器的下口还按照ABC的顺序引出线接到电机绕组连接片,而同时要按照ACB或BAC或CBA的顺序将引出线接到另外一个接触器的下口),另外还要在接触器到电机接线盒接线处之间先行串接热继电器的主接点,同时还要在电源引线与接触器上口之间串接熔断器。这样全部回路大致接好了。
短路保护由熔断器担负,过载有热继电器承担。 查看全部
短路保护由熔断器担负,过载有热继电器承担。 查看全部
控制回路要先将分别控制正反转停止的两个按钮串联接好,随后将两个分别控制正反转启动的两个按钮并联接好后与停钮的一端接好,停钮的另一端准备与电源连接,然后再把分别正转反转主接触器的常开辅助接点分别并联在各自相对应的启动按钮两端,之后再将各自主接触器的常闭辅助接点串联到对方的启动回路中,也就是说正转的常闭串接在反转启动按钮的一端,相对应反转的常闭接点要与正转的启动按钮一端串联,起到互锁的作用,(就是说正转运行时期接触器常闭辅助接点会将反转的启动回路断开,反之则依然是这个道理,为的是防止同时期按下下按钮会造成一次回路的相间短路,这个待会再解释),然后将两个常闭接点的另一端分别与所对应的启动回路的主接触器的线圈一段进行连接(就是说控制正转地启动的回路就串接正转接触器的线圈一段,反转起动控制回路就与反转的主接触器线圈一端串接,不要弄混了)将两个线圈的另一端并联接在一起后接入热继电器的常闭接点的一端,热继电器常闭接点的另一端准备与中性点N或另一相线连接,这要看主接触器线圈的电压(220V就与中性点N连接,380v的话就接另外一相线),还需要在控制回路的最前端即停止按钮准备接电源的一端在接相线制前要经过一个控制保险,现在只能说控制回路接好了。下面就接主回路,主回路需要2个接触器,分别用于正转和反转时接通主回路,所以将两个接触器主触头的上端分别与三相交流电源的3条相线连接,而主触头的下端对应的触头上则要将其中任意两条线互换一下,然后按照互换以后的顺序接入电动机绕组连接好以后的3个连接片上(比如说三相电源ABC顺序接到一个接触器上口,并在此处按照相同的顺序与另外一个接触器上口并联,然后其中一个接触器的下口还按照ABC的顺序引出线接到电机绕组连接片,而同时要按照ACB或BAC或CBA的顺序将引出线接到另外一个接触器的下口),另外还要在接触器到电机接线盒接线处之间先行串接热继电器的主接点,同时还要在电源引线与接触器上口之间串接熔断器。这样全部回路大致接好了。
短路保护由熔断器担负,过载有热继电器承担。
短路保护由熔断器担负,过载有热继电器承担。
988 浏览
史上最全的机械传动动画,这是机械人砖瓦
智能制造类 Leader 2016-11-07 21:09 发表了文章
平面连杆机构
凸轮机构

间歇运动机构螺旋传动 带传动 链传动
齿轮传动
间歇运动机构螺旋传动 带传动 链传动
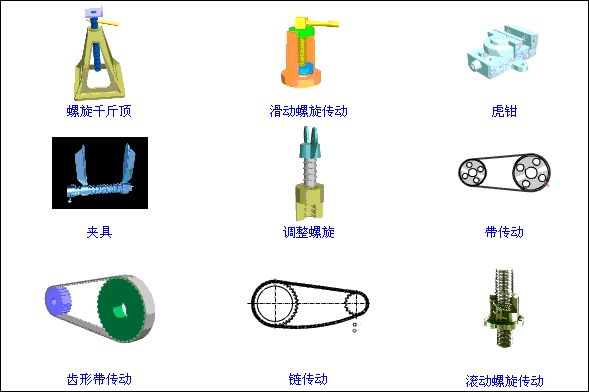
齿轮传动蜗杆传动

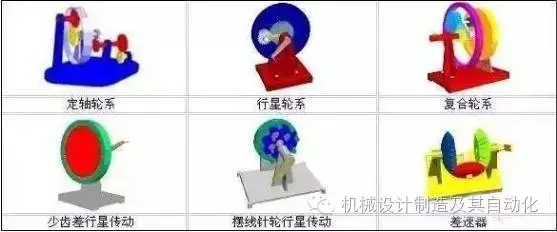
齿轮系
来源:1号机器人
智造家提供
凸轮机构
间歇运动机构螺旋传动 带传动 链传动
齿轮传动
间歇运动机构螺旋传动 带传动 链传动
齿轮传动蜗杆传动
齿轮系
来源:1号机器人
智造家提供
6 回答
1 回答
1 回答
2 回答
702 浏览
条新动态, 点击查看
卡死的原因有很多:整个机构的平行度,垂直度,装配精度,水平度等引起;从而导致导套的同心度,导套轴线的平行度间隙过大卡死;(零部件选型精度的偏差也不能排除)
建议:(现场根据卡死的频次和松紧度等因素综合考虑)
1,通过红丹配模的方式找出容易卡死的区域,并通过检测... 显示全部 »
建议:(现场根据卡死的频次和松紧度等因素综合考虑)
1,通过红丹配模的方式找出容易卡死的区域,并通过检测... 显示全部 »
卡死的原因有很多:整个机构的平行度,垂直度,装配精度,水平度等引起;从而导致导套的同心度,导套轴线的平行度间隙过大卡死;(零部件选型精度的偏差也不能排除)
建议:(现场根据卡死的频次和松紧度等因素综合考虑)
1,通过红丹配模的方式找出容易卡死的区域,并通过检测的手段修正间隙偏差;(在平面度和垂直度修正时可以垫一些不同厚度的铜片等方式)
2,在导柱上加些润滑油,减少摩擦系数;
3,经常清理避免杂物进入;
建议:(现场根据卡死的频次和松紧度等因素综合考虑)
1,通过红丹配模的方式找出容易卡死的区域,并通过检测的手段修正间隙偏差;(在平面度和垂直度修正时可以垫一些不同厚度的铜片等方式)
2,在导柱上加些润滑油,减少摩擦系数;
3,经常清理避免杂物进入;
6 回答
1 回答
1 回答
2 回答
369 浏览
机械互锁和电气互锁原理的区别
机械自动化类 小明记得记得#87 2017-02-08 10:22 发表了文章
控制回路要先将分别控制正反转停止的两个按钮串联接好,随后将两个分别控制正反转启动的两个按钮并联接好后与停钮的一端接好,停钮的另一端准备与电源连接,然后再把分别正转反转主接触器的常开辅助接点分别并联在各自相对应的启动按钮两端,之后再将各自主接触器的常闭辅助接点串联到对方的启动回路中,也就是说正转的常闭串接在反转启动按钮的一端,相对应反转的常闭接点要与正转的启动按钮一端串联,起到互锁的作用,(就是说正转运行时期接触器常闭辅助接点会将反转的启动回路断开,反之则依然是这个道理,为的是防止同时期按下下按钮会造成一次回路的相间短路,这个待会再解释),然后将两个常闭接点的另一端分别与所对应的启动回路的主接触器的线圈一段进行连接(就是说控制正转地启动的回路就串接正转接触器的线圈一段,反转起动控制回路就与反转的主接触器线圈一端串接,不要弄混了)将两个线圈的另一端并联接在一起后接入热继电器的常闭接点的一端,热继电器常闭接点的另一端准备与中性点N或另一相线连接,这要看主接触器线圈的电压(220V就与中性点N连接,380v的话就接另外一相线),还需要在控制回路的最前端即停止按钮准备接电源的一端在接相线制前要经过一个控制保险,现在只能说控制回路接好了。下面就接主回路,主回路需要2个接触器,分别用于正转和反转时接通主回路,所以将两个接触器主触头的上端分别与三相交流电源的3条相线连接,而主触头的下端对应的触头上则要将其中任意两条线互换一下,然后按照互换以后的顺序接入电动机绕组连接好以后的3个连接片上(比如说三相电源ABC顺序接到一个接触器上口,并在此处按照相同的顺序与另外一个接触器上口并联,然后其中一个接触器的下口还按照ABC的顺序引出线接到电机绕组连接片,而同时要按照ACB或BAC或CBA的顺序将引出线接到另外一个接触器的下口),另外还要在接触器到电机接线盒接线处之间先行串接热继电器的主接点,同时还要在电源引线与接触器上口之间串接熔断器。这样全部回路大致接好了。
短路保护由熔断器担负,过载有热继电器承担。 查看全部
短路保护由熔断器担负,过载有热继电器承担。 查看全部
控制回路要先将分别控制正反转停止的两个按钮串联接好,随后将两个分别控制正反转启动的两个按钮并联接好后与停钮的一端接好,停钮的另一端准备与电源连接,然后再把分别正转反转主接触器的常开辅助接点分别并联在各自相对应的启动按钮两端,之后再将各自主接触器的常闭辅助接点串联到对方的启动回路中,也就是说正转的常闭串接在反转启动按钮的一端,相对应反转的常闭接点要与正转的启动按钮一端串联,起到互锁的作用,(就是说正转运行时期接触器常闭辅助接点会将反转的启动回路断开,反之则依然是这个道理,为的是防止同时期按下下按钮会造成一次回路的相间短路,这个待会再解释),然后将两个常闭接点的另一端分别与所对应的启动回路的主接触器的线圈一段进行连接(就是说控制正转地启动的回路就串接正转接触器的线圈一段,反转起动控制回路就与反转的主接触器线圈一端串接,不要弄混了)将两个线圈的另一端并联接在一起后接入热继电器的常闭接点的一端,热继电器常闭接点的另一端准备与中性点N或另一相线连接,这要看主接触器线圈的电压(220V就与中性点N连接,380v的话就接另外一相线),还需要在控制回路的最前端即停止按钮准备接电源的一端在接相线制前要经过一个控制保险,现在只能说控制回路接好了。下面就接主回路,主回路需要2个接触器,分别用于正转和反转时接通主回路,所以将两个接触器主触头的上端分别与三相交流电源的3条相线连接,而主触头的下端对应的触头上则要将其中任意两条线互换一下,然后按照互换以后的顺序接入电动机绕组连接好以后的3个连接片上(比如说三相电源ABC顺序接到一个接触器上口,并在此处按照相同的顺序与另外一个接触器上口并联,然后其中一个接触器的下口还按照ABC的顺序引出线接到电机绕组连接片,而同时要按照ACB或BAC或CBA的顺序将引出线接到另外一个接触器的下口),另外还要在接触器到电机接线盒接线处之间先行串接热继电器的主接点,同时还要在电源引线与接触器上口之间串接熔断器。这样全部回路大致接好了。
短路保护由熔断器担负,过载有热继电器承担。
短路保护由熔断器担负,过载有热继电器承担。
988 浏览
史上最全的机械传动动画,这是机械人砖瓦
智能制造类 Leader 2016-11-07 21:09 发表了文章
平面连杆机构
凸轮机构
间歇运动机构螺旋传动 带传动 链传动
齿轮传动
间歇运动机构螺旋传动 带传动 链传动
齿轮传动蜗杆传动
齿轮系
来源:1号机器人
智造家提供
凸轮机构
间歇运动机构螺旋传动 带传动 链传动
齿轮传动
间歇运动机构螺旋传动 带传动 链传动
齿轮传动蜗杆传动
齿轮系
来源:1号机器人
智造家提供
702 浏览
734 浏览
699 浏览
630 浏览
677 浏览
459 浏览